* Reduce the use of @boardname@ * Use literal 'EV3 Brick' string instead * Use the new 'nickname' form
7.1 KiB
Coding in MakeCode
This guide helps users who are used to work with @boardname@ to get familiar with using blocks in MakeCode.
Snap together the blocks
Just like with LabView, blocks in the MakeCode editor can be dragged from the cabinet and snapped together to create a sequence of program instructions.
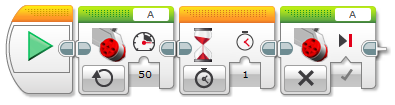
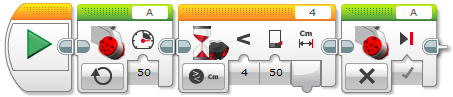
Take a look a the LabView program below: it starts, turns on motor A, waits a second, and finally stops motor A.
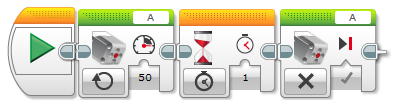
The blocks in MakeCode have similar functions and go together in the same way: they snap into the ||loops:on start|| block and then connect to each other vertically.
motors.largeA.run(50)
pause(1000)
motors.largeA.stop()
Any block program can be converted to JavaScript and you can edit it as lines of code too.
motors.largeA.run(50)
pause(1000)
motors.largeA.stop()
Download to the EV3
Before you actually run your program on the EV3 Brick, you can first try it in the simulator. The MakeCode editor includes a simulator in the browser for you to test your code. You can make changes to your program and check them out it the simulator to make sure your code works the way want. The similator knows when you modify your code and it restarts automatically to run the new code.
Once you're ready to transfer your program to the EV3 Brick, click the |Download| button and follow the instructions.
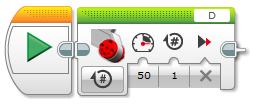
Single motors
This program controls a large motor on port A in several different ways. It sets just the speed and then sets speed for: an amount of time, angle of movement, and a number of rotations.

motors.largeA.run(50);
motors.largeA.run(50, 1000, MoveUnit.MilliSeconds);
motors.largeA.run(50, 360, MoveUnit.Degrees);
motors.largeA.run(50, 1, MoveUnit.Rotations);
motors.largeA.stop();
Steering
The steering blocks let you to synchronize two motors at a precise rate. They can also specify the duration, angle, or number of rotations for the motors to turn.

motors.largeBC.steer(0, 50);
motors.largeBC.steer(0, 50, 1000, MoveUnit.MilliSeconds);
motors.largeBC.steer(0, 50, 360, MoveUnit.Degrees);
motors.largeBC.steer(0, 50, 1, MoveUnit.Rotations);
motors.largeBC.stop();
Tank
The tank blocks control the speed of two motors. These are commonly used for a differential drive robot. The blocks can also specify the duration, angle, or number of rotations.

motors.largeBC.tank(50, 50);
motors.largeBC.tank(50, 50, 1000, MoveUnit.MilliSeconds);
motors.largeBC.tank(50, 50, 360, MoveUnit.Degrees);
motors.largeBC.tank(50, 50, 1, MoveUnit.Rotations);
motors.largeBC.stop();
Coasting and braking
By default, all motors coast when any command used to move finishes. You can keep them from coasting with the ||motors:set brake|| block.
motors.largeD.setBrake(true);
motors.largeD.run(50, 1, MoveUnit.Rotations)
Inverting and regulating motors
If you wan to change the direction that a motor turns, use the ||motors:set inverted|| block.

motors.largeA.setInverted(true);
By default, the speed of motors is regulated. This means that if your robot goes up a hill,
the regulator will adjust the power to match the desired speed. You can disable this feature
using ||motors:set regulated||.

motors.largeA.setRegulated(false);
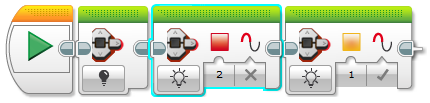
Brick
The Brick category has a number of blocks to display graphics on the brick screen.

brick.clearScreen()
brick.showImage(images.expressionsWink)
brick.setStatusLight(StatusLight.Off);
brick.setStatusLight(StatusLight.Red);
brick.setStatusLight(StatusLight.OrangePulse);
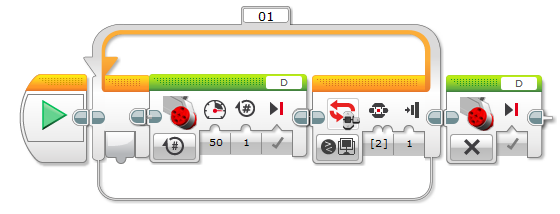
Waiting (pausing)
It is quite common to have to wait for a task to finish or for a sensor state to change, such as a touch button pressed. The ||loops:pause|| and ||sensors:pause until|| blocks provide a way for your program to wait for a period of time.
motors.largeD.run(50)
pause(1000)
motors.largeD.stop();

motors.largeD.run(50)
sensors.touch1.pauseUntil(ButtonEvent.Pressed)
motors.largeD.stop();
motors.largeD.run(50)
sensors.ultrasonic4.pauseUntil(UltrasonicSensorEvent.ObjectNear)
motors.largeD.stop();
You can also use the ||loops:pause until|| block to wait on any boolean expression. As your program runs, it waits until the condition (expression) inside becomes true.
motors.largeD.run(50)
pauseUntil(() => sensors.touch1.isPressed())
motors.largeD.stop()
Loops

forever(() => {
motors.largeD.run(50, 1, MoveUnit.Rotations);
motors.largeD.run(-50, 1, MoveUnit.Rotations);
})
for(let i = 0; i < 10; i++) {
motors.largeD.run(50, 1, MoveUnit.Rotations);
motors.largeD.run(-50, 1, MoveUnit.Rotations);
}
let k = 0;
while(k < 10) {
motors.largeD.run(50, 1, MoveUnit.Rotations);
motors.largeD.run(-50, 1, MoveUnit.Rotations);
k++;
}
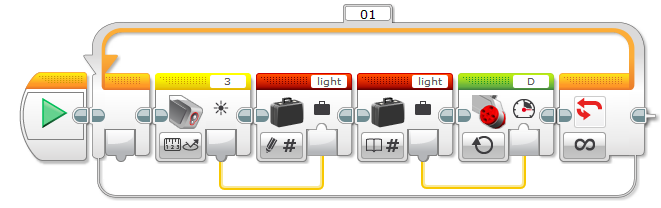
Variables
let light = 0;
forever(function () {
light = sensors.color3.light(LightIntensityMode.Reflected);
motors.largeD.run(light)
})
Concurrent loops
You can start up multiple ||loops:forever|| loops that will run at the same time. Actually, only the code in just one of the loops is really running at any exact moment in time. Each loop, though, gets a turn to run all of its code and this makes them run concurrently.

forever(() => {
motors.largeD.run(50, 1, MoveUnit.Rotations);
motors.largeD.run(-50, 1, MoveUnit.Rotations);
})
forever(() => {
brick.showImage(images.eyesMiddleRight)
pause(1000)
brick.showImage(images.eyesMiddleLeft)
pause(1000)
})
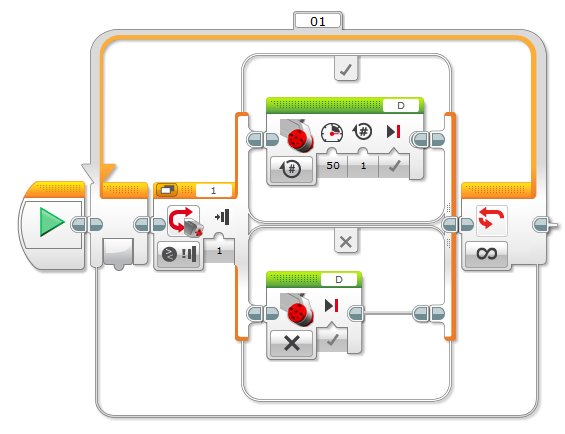
Conditional
The ||logic:if|| block allows you to run different code depending on whether some condition (boolean expression) is true or false. Also, this is similar to the ||loops:switch|| block.
forever(function() {
if(sensors.touch1.isPressed()) {
motors.largeD.run(50)
} else {
motors.largeD.stop()
}
})
Random
The ||math:pick random|| block returns a random number selected from a range of numbers.
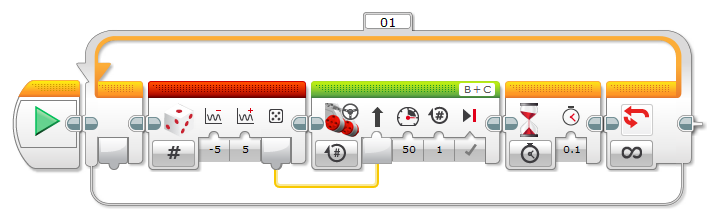
forever(function () {
motors.largeBC.steer(Math.randomRange(-5, 5), 50)
pause(100)
})